Een onderzoeksteam van het Laboratoire d’Informatique, de Robotique et de Microélectro-nique de Montpellier (LIRMM) heeft gedemonstreerd, hoe een robot zowel zijn eigen arm als die van een persoon kan gebruiken om gezamenlijk objecten te verplaatsen. De robot bedient de menselijke arm door kleine stroompjes te sturen naar elektrodes die vastgeplakt zitten op de onderarm en de biceps. Hierdoor kan de robot de elleboog en de hand bewegen. In het experiment houdt de persoon een bal vast en de robot een net; de robot moet de beweging van beide armen coördineren om de bal met succes in het net te laten vallen.
Volgens de onderzoekers staat het proces nog in de conceptfase maar ze zijn er van overtuigd dat ook complexere opdrachten mogelijk zijn. Hun doel is de ont-wikkeling van robottechnologieën die mensen kunnen helpen met motorische bewegingen bij bepaalde vormen van een verlamming of handicap.
Het onderzoek is onderdeel van het Project Assist, met als doel de ontwikkeling van een tweearmige mobiele robot, die mensen met een meervoudige verlamming kan helpen om gewone dingen te verplaatsen.
Functioneel elektrische stimulatie
Een geavanceerde, actieve robotarm moet gehandicapte mensen kunnen assis-teren bij hun dagelijkse werkzaamheden. Ook andere technologieën zoals een op afstand bestuurbare robot, een brein-machine interface en aangedreven exoframes beloven meer mobiliteit voor fysiek gehandicapte mensen. Maar de onderzoekers zien ook voordelen in een robot die ledematen van een persoon kan bedienen.
De techniek die de onderzoekers gebruiken om dit te realiseren, staat bekend als functioneel elektrische stimulatie (FES). Dit wordt gebruikt in de revalidatie en geeft fysieke en psychologische voordelen voor de patiënt. Stel dat een robot een glas water naar een persoon met beperkte bewegingsmogelijkheden brengt. Vanuit medisch oogpunt moet de persoon worden gestimuleerd om meer te bewegen. De robot kan daarbij helpen door de arm van de persoon te bewegen en het glas vast te houden.
Een geschikte robotarm daarvoor is groot, zwaar en duur. Door gebruik te maken van de fysieke mogelijkheden van de persoon zelf kan de robotarm, die ontworpen is om mensen te helpen, goedkoper zijn en minder complex. Veel onderzoeksteams leren robots hoe ze met twee handen kunnen werken en daarom leek het voor de hand liggend om de menselijke arm in deze mix te integreren.
Tests
De wetenschappers plakten voor het onderzoek vier elektrodes op de arm bij de vijf gezonde vrijwilligers, die ook werden geblinddoekt om visuele feedback te voorkomen.Twee elektrodes op de onderarm controleren het openen van de hand, twee op de bovenarm die van de elleboog in één richting, naar de borst toe. De onderzoekers modelleerden een menselijke arm feitelijk als een seriële robotarm met één bewegingsvrijheid en ontwikkelden voor de bediening een controller die FES gebruikt.
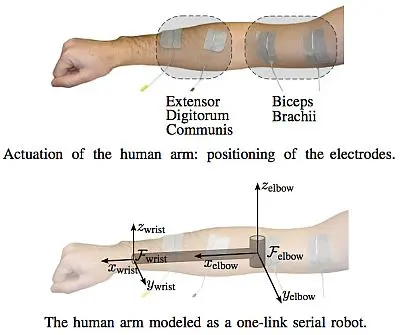
Plaatsing van de elektrodes en het wiskundig model van de onderarm. (foto’s: LIMMR/Bruno Adorno)
Bij elke test legt de test persoon zijn arm op een vlakke ondergrond en pakt de bal. Daarna neemt de robot, een Fujitsu HOAP-3 humanoïde, het over door de elleboog te bewegen om de bal dichter bij zijn werkplek te brengen. De robot beweegt ook zijn eigen arm, die vier vrijheidsgraden kent, naar een positie waarbij het net precies onder de bal hangt. Daarna laat hij de menselijke hand openen en valt de bal.De controle over de menselijke arm hoeft niet te precies te zijn; net goed genoeg om binnen de werkruimte van de robot te houden is dus voldoende.
De onderzoekersgaan er vanuit, dat het beter is om een robot te hebben die goed in staat is om de arm van een persoon te manipuleren dan een erg handige robot en een zwakke, onstabiele hand. De onderzoekers willen nu de elektrische stimu-latie gaan verbeteren. Ze zijn nu bijvoorbeeld in staat om de elleboog in beide richtingen te bewegen. Mogelijkerwijs kunnen ze de arm bewegen naar elk punt in de ruimte.
Veiligheid
De vraag is of het laten bedienen van een arm door de robot met behulp van elektrische stroom huidbeschadigingen veroorzaakt. Maar volgens de onderzoekers is de benadering veilig en kan met wat aanpassingen de stimulatie acceptabel worden gemaakt voor mensen.
Toch is het idee van de robot die ledematen bedient een beetje beangstigend. De bezoekers van de IEEE International Conference on Intelligent Robots and Systems (IROS), waar de onderzoekers in september hun resultaten presen-teerden, lieten nerveuze zuchten horen bij het zien van onderstaande video van het experiment.
